 Created from Youtube video: https://www.youtube.com/watch?v=wg9bI8-Qx2Qvideo
Created from Youtube video: https://www.youtube.com/watch?v=wg9bI8-Qx2QvideoConcepts covered:rotation matrix, special orthogonal group, right-hand rule, gimbal lock, Euler angles
This lecture extends the concept of rotation matrices from 2D to 3D, introducing the special orthogonal group in three dimensions and the right-hand rule for defining axes and rotation directions. It also discusses the importance of rotation order, the concept of gimbal lock, and how to extract roll, pitch, and yaw angles from a rotation matrix.
Table of Contents1.Extending Rotation Matrices to Three Dimensions2.Understanding Euler and Cardan Angles in 3D Rotations3.Understanding Gimbal Lock in 3D Rotations
chapter
1
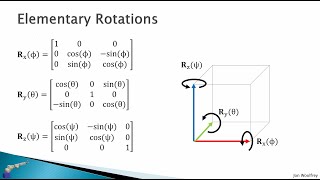
Extending Rotation Matrices to Three Dimensions
Concepts covered:rotation matrix, special orthogonal group, right-hand rule, elementary rotations, 3D unit vectors
This chapter extends the concept of the rotation matrix from two dimensions to three dimensions, incorporating the Z-axis. It explains the properties of the special orthogonal group in three dimensions and introduces the right-hand rule for defining elementary rotations about each axis.
Question 1
Rotation matrices in 3D have orthonormal columns.
Question 2
What does each column of a 3D rotation matrix represent?
Question 3
The rotation matrix in 3D includes unit vectors in _____ dimensions.
Question 4
CASE STUDY: A satellite in space needs to adjust its orientation by rotating 30 degrees about the X-axis.
All of the following are correct applications of the rotation matrix except...
Question 5
CASE STUDY: A robotic arm needs to rotate 180 degrees about the X-axis to position a tool.
Select three correct applications of the rotation matrix.
chapter
2
Understanding Euler and Cardan Angles in 3D Rotations
Concepts covered:Euler angles, Cardan angles, rotation matrices, commutative property, rotation sequence
The chapter discusses Euler angles and Cardan angles, which are methods of representing rotations in three-dimensional space. It explains the importance of the order of rotations and demonstrates that rotation matrices are not commutative, meaning the sequence of rotations affects the final orientation.
Question 6
Rotation order affects final orientation.
Question 7
Why are rotation matrices non-commutative?
Question 8
Cardan angles involve rotating about ____ axes.
Question 9
CASE STUDY: A drone is programmed to rotate about the X, Y, and Z axes in sequence. However, it ends up in an unexpected orientation.
All of the following could explain the error except...
Question 10
CASE STUDY: A virtual reality system uses rotation matrices to simulate head movements. The system rotates about the Z, Y, and X axes.
Select three correct characteristics of this system.
chapter
3
Understanding Gimbal Lock in 3D Rotations
Concepts covered:gimbal lock, rotation matrix, roll pitch yaw, trigonometry, 3D rotations
This chapter discusses the problem of gimbal lock when working with roll, pitch, and yaw angles in 3D rotations. It explains how gimbal lock occurs when the pitch angle is ±π/2, making it impossible to distinguish between roll and yaw angles, and suggests ways to avoid this issue.
Question 11
We can extract roll, pitch, yaw from a rotation matrix.
Question 12
Why is the order of rotations important?
Question 13
The right-hand rule is used to denote _____ and directions of rotation.
Question 14
CASE STUDY: A spacecraft's orientation is controlled using roll, pitch, and yaw angles. During a mission, the pitch angle reaches ±π/2, causing loss of orientation.
All of the following are correct applications to fix orientation loss except...
Question 15
CASE STUDY: You are analyzing a rotation matrix for a robotic system. The matrix was formed from rotations about the X, Y, and Z axes. You need to extract the roll, pitch, and yaw angles.
Select two correct methods to extract angles from the matrix...
Would you like to create and run this quiz?
yesCreated with Kwizie