 Created from Youtube video: https://www.youtube.com/watch?v=-T6Ec-KxMT8video
Created from Youtube video: https://www.youtube.com/watch?v=-T6Ec-KxMT8videoConcepts covered:skew-symmetric, time derivative, rotation matrix, kinematic chain, partial derivative
The video explains the time derivative of the rotation matrix, showing that it is skew-symmetric and derived using the product rule. It also discusses the propagation of rotation matrices for small time steps and the partial derivatives of rotation matrices in kinematic chains, highlighting the conditions under which these derivatives are non-zero.
Table of Contents1.Time Derivative and Skew-Symmetric Properties of Rotation Matrices2.Effect of Joint Variables on Rotation Matrices in Kinematic Chains
chapter
1
Time Derivative and Skew-Symmetric Properties of Rotation Matrices
Concepts covered:rotation matrix, time derivative, skew-symmetric matrix, angular velocities, cross product
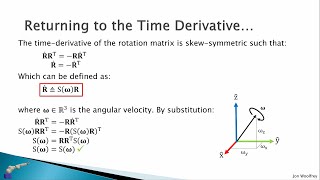
This chapter discusses the time derivative of the rotation matrix, emphasizing its skew-symmetric nature. It explains how the skew-symmetric matrix is derived from a 3D vector of angular velocities and its properties, including its relationship with the cross product and the identity matrix.
Question 1
The time derivative of a rotation matrix is skew symmetric.
Question 2
What is the time derivative of the identity matrix?
Question 3
The time derivative of the rotation matrix is _____.
Question 4
CASE STUDY: An aerospace engineer is analyzing the rotational dynamics of a satellite. They need to determine the time derivative of the rotation matrix to understand the satellite's orientation changes over time.
All of the following are correct applications of the time derivative of the rotation matrix except:
Question 5
CASE STUDY: An automotive engineer is developing a new stability control system. They need to understand the properties of the rotation matrix and its time derivative.
Select two correct properties of the time derivative of the rotation matrix:
chapter
2
Effect of Joint Variables on Rotation Matrices in Kinematic Chains
Concepts covered:joint variable, rotation matrix, skew-symmetric, kinematic chain, partial derivative
This chapter discusses the effect of a joint variable on a rotation matrix within a kinematic chain, emphasizing the skew-symmetric nature of the time derivative of the rotation matrix. It also explores the conditions under which the partial derivatives of the rotation matrix are non-zero and the limitations of propagating rotations over time.
Question 6
The time derivative of a rotation matrix is skew symmetric.
Question 7
What is the partial derivative of R with respect to Q?
Question 8
The time derivative of the rotation matrix is _____.
Question 9
CASE STUDY: A robotic arm has a joint variable Q affecting a rotation matrix R in its kinematic chain. The time derivative of R is skew symmetric.
All of the following are correct applications of skew symmetry except...
Question 10
CASE STUDY: You are analyzing the propagation of rotation matrices in a robotic arm for very small time steps.
Select two correct statements about rotation propagation.
Would you like to create and run this quiz?
yesCreated with Kwizie